- 작성일
- 2024.11.05
- 수정일
- 2024.11.05
- 작성자
- 공과대학
- 조회수
- 14
하창완 석사과정생, 제어로봇시스템 국제학회서 우수논문상 수상
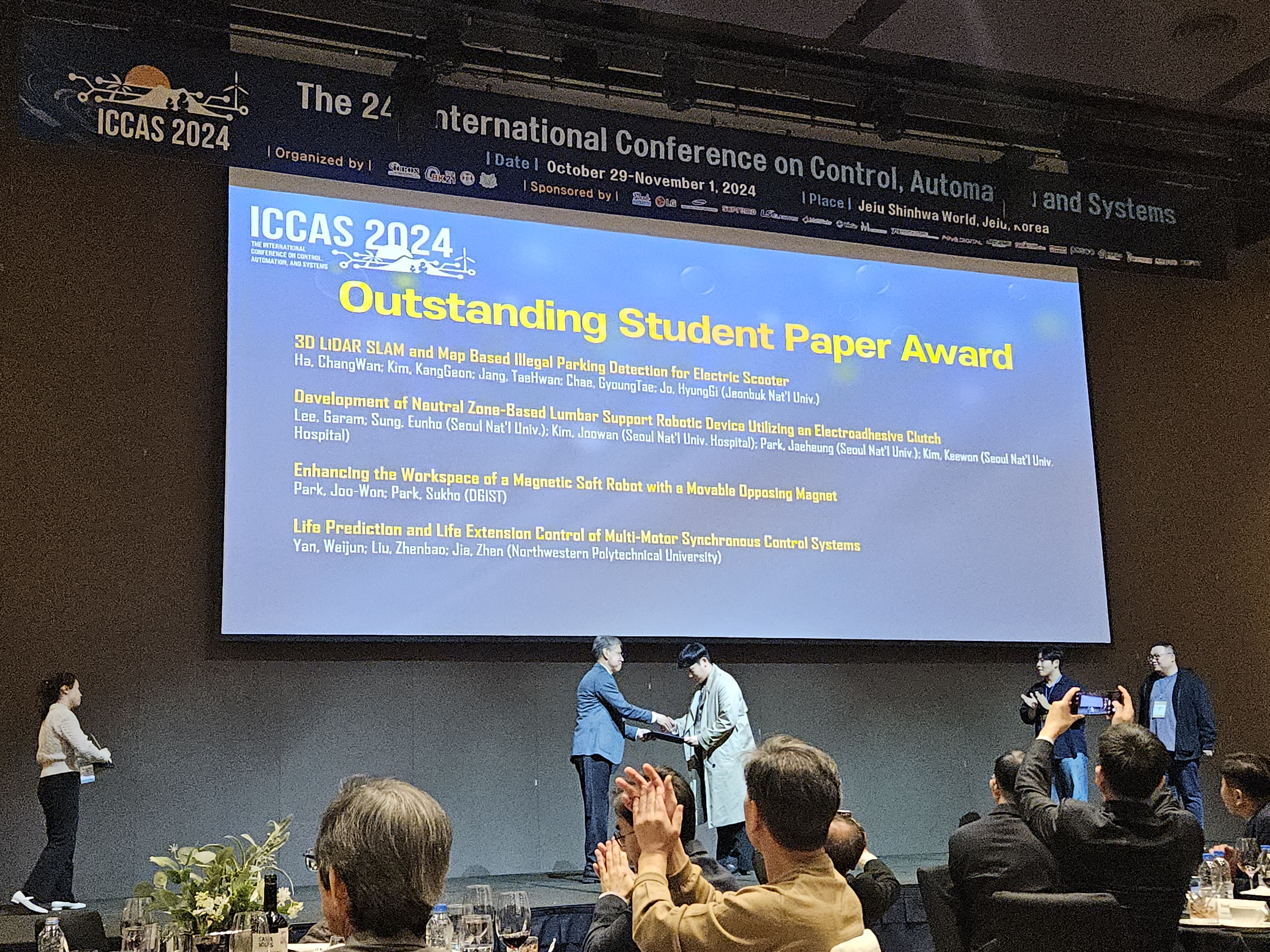
하창완 석사과정생(전자공학부 AI Robotics Lab, 지도교수 조형기)이 최근 열린 국제학술대회인 'International Conference on Control, Automation and Systems 2024(ICCAS2024)'에서 자율주행 로봇을 이용한 불법 주차 킥보드를 검출시스템에 관한 연구(3D LiDAR SLAM and Map based Illegal Parking Detection for Electric Scooter)를 발표해 우수논문상(Outstanding Student Paper)을 수상했다.
이 연구는 교내 캠퍼스에서 불법 주차된 킥보드를 검출하기 위해 3D LiDAR 센서를 이용한 위치인식 및 지도구축(SLAM) 기술과 딥러닝 기반 시맨틱 분할 기술을 기반으로하는 주행 로봇 시스템을 제안하였다. 본 연구에서는 대공간 위치 인식과 객체 인식에서 발생할 수 있는 오차를 효과적으로 줄이는 엣지 기반 검출 알고리즘을 통해 안정성을 확보했다. 실제 전북대학교 캠퍼스 내에서 모바일 로봇을 이용해 킥보드 전용 주차 구역이 아닌 곳에 주차되어 있는 킥보드를 검출하여 알림을 주는 실험을 진행했다.
한편, 이번 연구는 한국연구재단 우수신진연구, RIS 미래수송기기 신산업 육성 사업의 지원으로 수행됐다.
이 연구는 교내 캠퍼스에서 불법 주차된 킥보드를 검출하기 위해 3D LiDAR 센서를 이용한 위치인식 및 지도구축(SLAM) 기술과 딥러닝 기반 시맨틱 분할 기술을 기반으로하는 주행 로봇 시스템을 제안하였다. 본 연구에서는 대공간 위치 인식과 객체 인식에서 발생할 수 있는 오차를 효과적으로 줄이는 엣지 기반 검출 알고리즘을 통해 안정성을 확보했다. 실제 전북대학교 캠퍼스 내에서 모바일 로봇을 이용해 킥보드 전용 주차 구역이 아닌 곳에 주차되어 있는 킥보드를 검출하여 알림을 주는 실험을 진행했다.
한편, 이번 연구는 한국연구재단 우수신진연구, RIS 미래수송기기 신산업 육성 사업의 지원으로 수행됐다.
- 첨부파일
- 첨부파일이(가) 없습니다.